 深圳汽車網
深圳汽車網[本站 資訊] 2021年3月26日,“智創?第三空間”2021中國智能汽車創新發展論壇暨本站智能汽車評價體系發布會于北京隆重開幕。本次會議以“賦能行業發展 指導用戶消費”為宗旨,分享中國智能汽車產業的最新觀點和未來技術發展趨勢,共商如何突破產業瓶頸實現產業融合,在變革關鍵期成功搭建行業前沿溝通交流平臺。馭勢科技乘用車自動駕駛負責人葉凌峽發表了《行之無拘無束,心方駕馭未來――智能駕駛系統的演變與挑戰》主題演講。


葉凌峽認為,智能駕駛系統是不斷演進的。從技術角度來看,智能駕駛系統分為感知、決策和執行。從場景來看,將從特定場景到限定場景再到開放場景。與此同時,智能駕駛的需求也在發生改變,即從為駕駛員服務轉為出行服務。
以下為馭勢科技乘用車自動駕駛負責人 葉凌峽的演講實錄:
非常榮幸能夠來到本站和各位嘉賓、專家們一起探討智能駕駛系統的發展。今天,我將從四個方面來和大家一起探討智能駕駛的發展及定義,智能駕駛系統的演變、面臨的挑戰,以及智能駕駛路線及方案。

當前,全球汽車行業正在經歷百年以來最深刻的變革。我們如何定義智能駕駛系統,按照美國汽車工程學會規定,自動駕駛分為L0-L5六個級別。L0級別是指沒有任何自動駕駛功能,L1和L2為高級駕駛輔助駕駛水平,L3是指有條件的自動駕駛,即司機可在特定條件下雙手離開方向盤,L4和L5則分別指高度自動駕駛和完全自動駕駛。L5級自動駕駛是智能汽車發展的最高狀態。

對于L3級別的有條件自動駕駛來說,是駕駛輔助和自動駕駛的分界線。從某種角度來說L3級別也是自動駕駛,但從另外一個角度來說,它在駕駛過程中又離不開駕駛員的監控,所以我們把它作為分界點,直到L5級才能真正地稱為全自動駕駛。
對于智能駕駛系統的演變,從功能來講,最早的智能駕駛系統實際上只是一種帶有預警性的、不能對車輛進行控制的系統,比如說我們的主動碰撞預警(FCW),車道偏離預警(LDW)輔助泊車等。隨著功能的演進,我們會看到車輛上會安裝車輛進行控制系統,如自動巡航(CC)、自動緊急制動(AEB),接下來演進到自適應巡航(ACC)、車道保持系統輔助(LKS)、自主定義泊車。最后,合起來將實現超級巡航、再到L3級有條件自動駕駛,以及L4級高度自動駕駛。
從智能駕駛系統技術的演進來看,智能駕駛系統分為感知、決策和執行。在感知上用到視覺、毫米波雷達、激光雷達、超聲波、GPS,這都可以作為感知能力。對于決策來說,需要做到融合、定位和車輛控制常規規則的判斷。這就是處理大腦,從原理單處理器的模式往未來的預控制器模式在演進。執行層面來講,則需要具備車輛縱橫向控制。

從智能駕駛系統場景來看,主要是從原來的特定場景到限定場景再到開放場景進行演變的。特定場景一般指封閉園區或者是一些專用的道路,這個專用的道路可以理解為港區物流,很多是用磁釘在走。到限定場景,這是應對L3級有條件自動駕駛,會讓L3級有條件自動駕駛在高速道路上行進。最后,我們會發展到真正的開放道路,也就是城區道路。
接下來,我們關注自動駕駛需求演進,即原來的自動駕駛系統是為駕駛員服務,如今則是變成為出行服務。原來關注駕駛過程,怎么把駕駛變得更輕松或者更安全,這是自動駕駛系統原來的目標。后來會關注駕駛結果,如自動駕駛系統會把我送到哪里,我要到哪里辦事、上班或者是娛樂。但是我肯定不會關注你怎么駕駛,你的駕駛情況是什么樣。
下面來探討一下智能駕駛系統面臨的挑戰。首先是技術,談了這么多智能駕駛系統,我們對智能駕駛系統還是存在一些不放心的狀態,為什么?

實際上是因為我們的技術是有缺陷的,這些缺陷在什么地方?第一是感知能力。也就是說智能駕駛系統現在花了大量的精力在感知上面。因為如果一個車輛不能感知到周邊的環境情況,它就是一個瞎子,一個瞎子怎么把自己的路線行駛好,所以感知能力是重中之重。但是現在的感知系統是有缺陷的。比如說,毫米波雷達雖然不會漏報,但是會誤報,只要探測到的物體都會反饋給系統,所以很有可能產生偏差。如此前特斯拉發生的事故,實際上都是來自于攝像頭不能完整識別目標產生的,比如說它把一個大卡車的車箱識別不出來,它漏報了物體所以導致了誤判。這就意味著,在感知層面,無論是攝像頭、毫米波雷達還是激光雷達也好,它們都存在一定的技術缺陷。只有當感知能力達到一定程度的時候,才能實現更好的融合,進而保證它們對外界感知的準確性和安全性。
第二,學習能力。對于系統來說,我們在設計一套智能駕駛系統的情況下,會把駕駛經驗賦予智能駕駛系統,但是我們的經驗是否足夠,遇到特殊的情況智能駕駛系統能否繼續前行?想要實現這一目的,就應該給智能駕駛系統賦予一個學習能力,這是我們需要關注的一點,也是一個挑戰。
第三,執行能力。當我們想要這輛車實現左、右、前行、倒退的駕駛操作,但是車輛卻不聽你的指令,該怎么辦?所以說,對于車輛的執行能力的強弱也是智能駕駛系統的挑戰之一。
其次,智能駕駛系統還面臨著法規的挑戰。智能駕駛系統能否真正的面世,讓每個客戶都能夠用上,法規是很重要的。這里就要求法規具有標準化,明確產品是怎么定義的,安全要求有何標準等。
再次,是服務上的挑戰。智能駕駛系統有它的特殊性,究竟要怎么維護它,如何進行技術支持都需要我們進行探討,并且在這過程中,我們不斷迎接新的挑戰。
更為關鍵的是,想要實現全自動駕駛,外部建設也有很重要的需求。比如說道路的規范性、智能交通設備的完善程度、5G技術的發展等等。
說完智能駕駛系統的演變和面臨的挑戰后,接下來針對智能駕駛系統的行業路線和方案給大家做一個介紹。
當前,L2級高級駕駛輔助駕駛水平的ADAS系統已經成熟,L2級高級駕駛輔助駕駛水平的自動駕駛也逐步量產。L3級有條件自動駕駛+AVP的全套智能駕駛系統也將面世。
目前毫米波雷達加上攝像頭成為智能駕駛系統配制的主流,隨著技術的成熟,激光雷達也會大量的進入到量產裝備。
此外,數據采集也越來越被各家所重視,智能駕駛系統企業都致力于設計具備多種影子模式的數據閉環系統。然后是可以不斷向上演進的技術架構,成為智能駕駛系統的發展方向。
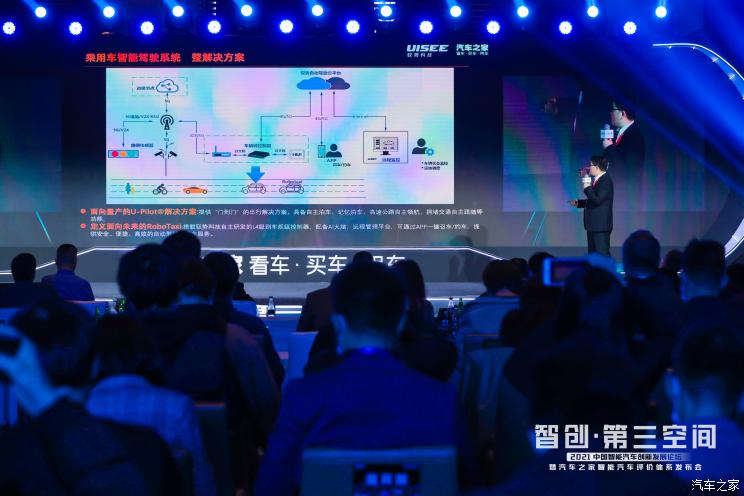
那么,什么是智能駕駛系統完整解決方案呢?它將基于智能駕駛云平臺,同時以5G技術為依托,提供“門到門”的出行解決方案,具備自主泊車、記憶泊車、高速路自主領航等功能,甚至還有RoboTaxi系統,將未來智能駕駛系統得以實現。
對于電子電氣架構的演變,我們總結了一條,從簡單到復雜再到簡單,為何這樣說呢?
首先,在處理能力有限的情況下,處理器就是一個單處理器,即一個ECU,到后來會發展到預控制器能處理很多的功能。但是為了保障系統是否安全,需要提供一些冗余的能力,可能我會把它分散到各個單處理器上面,分擔一部分處理能力。所以說,整個電氣處理架構的發展都在探索中。是否是處理能力很強的預控制器,就能把所有的功能實現,還是要把預算風險,失效風險做一個分散,還可能有待探討。
此外,集中化的管理,這一點毋庸置疑。從特斯拉的應用來看,它會把相對集中的功能放到對應的預控制器中,進而完成整套系統的實現。這一點也獲得各大廠商的認可,現在之所以預控制器的發展越來越普遍,是因為大家都有集中化管理的需求。
另外是軟件地位的變化,軟件定義汽車是未來的發展趨勢。我們可能看到的趨勢是硬件標準化、軟件差異化,只有通過這樣的方式,才能實現各家廠商的靈活性配制和差異化的賣點。
最后是升級能力,可以說沒有OTA升級的智能汽車,可能不會受到大家的關注。
針對智能駕駛系統在國內的發展趨勢,在這里做一個總結。時間節點大致從2009年起,國內廠商就開始了ADAS系統的研發,到2011年,有了少量搭載ADAS系統的車輛上市。在2016年,對ADAS系統來說,很多國內廠商的車輛上都已經實現配制了。到了2020年,具備L2級別高級駕駛輔助駕駛水平的車輛已經大量上市。按照目前各大廠商的規劃,會在2023年推出相關的L3級有條件的自動駕駛。對于L4級高度自動駕駛的普及化,我們想可能會在2025年以后。
對于智能駕駛系統的開發來說,我們的終極目標是什么?是把這個系統作為AI駕駛員,相當于能夠替代人完全掌控這輛車。有了它的存在,不管是物流也好、出行也好,只需要關注你的目的地就行了。我的分享到此結束。謝謝大家!